

销售热线:
17871141891
多体动力学模块
模拟多体系统的动力学
“多体动力学模块”是 COMSOL Multiphysics® 软件的一款附加产品,其中提供一套先进的工具,支持使用有限元分析(FEA)来设计、优化二维和三维多体系统,能够模拟柔体和刚体混合系统,同时减少计算工作量,帮助用户找到系统中的关键部件,方便您在汽车工程、航空航天工程、生物力学等主要应用领域执行更加详细的部件级结构分析。
本模块提供内置的多物理场耦合,包括声-结构、实体-轴承和流体-多体相互作用。COMSOL® 软件的多物理场功能支持将多体动力学与其他物理效应(例如高级传热、流体流动、声学和电磁学)进行耦合分析。此外,您还可以进一步扩展建模功能,将非线性结构材料和 CAD 导入功能纳入建模仿真,以满足更广泛的仿真需求。

刚性和柔性部件
在多体系统建模中,柔体和刚体通过各种连接方式(例如关节、齿轮、凸轮、轴承、弹簧或阻尼器)相互作用,并承受大量的位移和旋转载荷。使用“多体动力学模块”的优点之一是您可以轻松混合刚性和柔性部件,以实现更为灵活的模型构建。
通常情况下,多体仿真中的所有或大部分部件都是刚性的,因此只需考虑刚体的自由度。然而,在某些情况下,您可能希望将其中一个或多个部分表示为柔性部件。借助本模块中提供的材料模型,您可以选择性地将刚性和柔性部件指派到模型,以执行包括非线性材料效应在内的详细结构分析。举例来说,“多体动力学模块”可用于计算结构的刚性部件中关节所承受的力,以及柔性组件中产生的应力。

静态分析和动态分析
“多体动力学模块”为组件的静态和动态行为建模提供了强大的工具,能够捕捉它们之间的平移和旋转运动,您可以执行各种类型的动态模型分析,包括:
· 瞬态
· 特征频率
· 频域
· 模态叠加
· 随机振动(与结构力学模块结合使用)
举例来说,本模块可用于模拟齿轮或链条等传动部件的动力学。然后,您可以将多体分析的结果用于其他类型的分析,例如疲劳评估或声学分析,以准确评估系统产生的噪声情况。
本模块可以计算多种物理量,包括位移、速度、加速度、关节力、齿轮接触力,以及柔性部件中的应力等。此外,您还可以对刚体之间的摩擦接触进行建模,与基于网格的标准接触相比,这种方法更加稳定和高效。

多体动力学模块的特征和功能
探索 COMSOL® 软件的多体动力学工具,助您实现多体系统的设计与优化。
内置用户接口
进行多体动力学分析时,您可以在 COMSOL Multiphysics® 环境中完成建模过程的所有步骤。“多体动力学模块”内置了一个多体动力学 接口,它是最为重要的工具之一,用于对柔性和刚性组件或两者组合的装配进行建模,其中提供了多种选项,包括模拟各种类型的关节、齿轮、链轮组件以及凸轮-从动机构。“零件库”可以帮助您构建组件的几何形状。软件会自动处理网格划分和求解器设置,并提供多个手动编辑选项。

多体动力学 接口,用于对两个机械部件之间的铰链进行建模。该结构采用柔性和刚性部件进行分析。
关节集合
为了设计逼真的多体动力学系统,本模块提供了一个全面的预定义关节集合,相互连接的多体组件之间的相对运动根据关节类型受到约束。其中包含以下关节类型:
· 棱柱
· 铰链
· 圆柱
· 螺纹
· 平面
· 球
· 槽
· 缩进槽
· 固定
· 距离
· 万向节
除了选择适当的关节类型外,您还可以对关节应用额外的属性,例如弹性、摩擦、约束(允许最大运动范围)和锁定。

本例使用由铰链关节和棱柱关节制成的不同组件之间的连接来模拟弹簧离心调速器,结果显示各个部分的位移和飞球的轨迹。
集总机械系统
集总机械系统 接口可通过具有集总组件(例如质量块和弹簧)的回路表示来模拟抽象的机械系统。这些集总组件可以按串联或并联的方式排列,用于分析位移、速度、加速度和力。
集总-结构连接 多物理场耦合可用于将这些系统插入基于任意结构力学物理场接口构建的有限元(FE)模型中。

集总机械系统 接口用于模拟具有 11 个自由度的车辆悬挂系统集总模型。
齿轮和齿条集合
本模块提供一个预定义的齿轮和齿条集合,让您能够轻松而可靠地创建包含多个运动部件的传动系统模型。通过自动检查正确轮齿啮合的可比性标准,该工具可以帮助您确定正确的齿轮副。齿轮可以直接安装在刚性或柔性轴上,也可以通过使用铰链和衬套进行安装。
为了增加传动系统模型的准确性和真实性,齿轮副还可以包含弹性、传动误差、齿隙和摩擦等额外参数。以下是我们提供的齿轮和齿条类型:
· 直齿轮,外部
· 直齿轮,内部
· 斜齿轮,外部
· 斜齿轮,内部
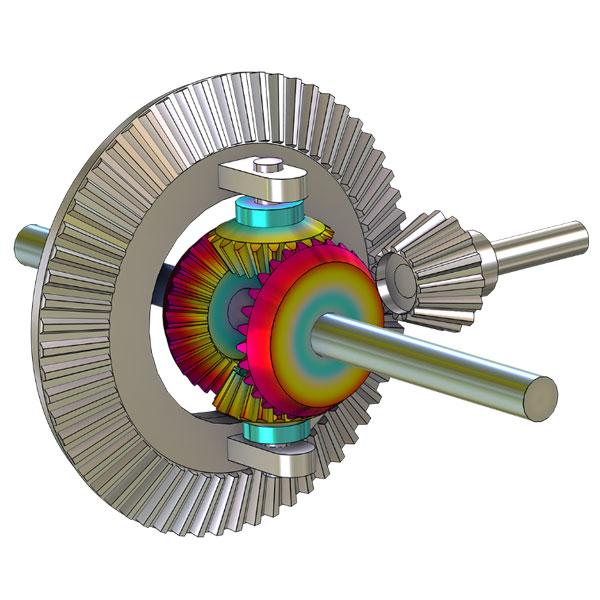
· 锥齿轮
· 蜗轮副
· 直齿条
· 斜齿条

本例对直齿轮系进行分析,以计算所有齿轮的角速度及其承受的力和力矩。结果显示壳体中的位移和法向加速度。
链传动
典型的链传动是由两个或多个链轮构成的组件,链轮上缠绕着链条,可以将机械动力从一个轴传递到另一个轴。通过使用多体动力学 接口中的链传动 特征,您可以对滚子链轮组件进行二维或三维建模,不仅能够确定链传动组件内的相互作用,还能自动生成一组多体动力学特征来描述组件的行为。

弹性链轮总成三维模型,其中的滚子链缠绕在两个链轮上。本例使用链传动 特征来快速建立链传动系统。结果显示链轮的应力分布。
径向滚子轴承
滚子轴承广泛应用于低速场景,其中噪音水平并不是一个重要的考虑因素。尽管这些轴承的使用寿命有限,尤其在不对中的情况下更为明显,但由于其成本较低,更换轴承变得轻而易举。
“多体动力学模块”与转子动力学模块结合使用时,可以提供多种不同类型的三维预定义径向滚子轴承,包括:
· 深沟球
· 角接触球
· 调心球
· 球面滚子
· 圆柱滚子
· 圆锥滚子

本例使用径向滚子轴承 特征通过在两个组件之间插入滚动体来模拟它们之间的相对旋转。结果显示不对中轴承的应力和轴承力以及轴的角速度。
刚体接触和摩擦
为了准确模拟刚体之间的机械接触,我们提供了刚体接触 特征,可以轻松模拟标准形状刚体之间的无网格接触。根据源体和目标体的形状,您可以使用以下不同类型的公式:
· 球到球
· 球到圆柱
· 球到平面
· 球到任意
· 圆柱到圆柱
· 圆柱到平面
除了这些刚体接触公式以外,我们还提供了一种通用公式,用于分析两个体(其中至少一个是柔体)之间的分布式接触。

圆柱滚子轴承系统,其中使用刚体接触 特征来模拟多个刚体之间的结构接触。结果显示接触力和速度。
凸轮-从动件连接
凸轮-从动件 连接特征用于通过在凸轮及其从动件之间施加双向约束来模拟简化接触。凸轮-从动系统通过一个点沿一组边界或边的跟随运动进行定义。凸轮可以在刚体和弹性体上定义,因此凸轮边界或边可以经历任意形式的刚体运动或变形。
该工具允许您将任何用户定义的凸轮轮廓绘制成几何模型,并根据位移、速度和加速度曲线计算从动件的运动。此外,还可以计算接触点的连接力,因此,通过查看连接力的符号,就可以预测凸轮与从动件之间的间歇接触。

本例分析一种带有摇臂和径向凸轮的弹簧式阀门开启机构,其中使用凸轮-从动件 特征来检查一个运动体的某个点是否与另一个运动体保持接触。
液体动压轴承
在进行液体动压轴承的多体分析时,需要与“转子动力学模块”中的液体动压轴承 接口进行耦合。本接口可用于分析三维液膜轴承,其中使用表面几何进行有效建模。当模型中同时存在多体动力学 和液体动压轴承 接口时,您可以使用实体-轴承耦合 多物理场耦合功能,轻松地对多体系统中的以下轴颈轴承进行建模:
· 滑动轴颈
· 椭圆轴颈
· 对开轴颈
· 多油叶轴颈
· 可倾瓦轴颈

本例分析由液体动压轴承支撑的单缸往复式发动机,其中使用“转子动力学模块”中的液体动压轴承 接口对轴承进行建模
部件模态综合法(CMS)
在“多体动力学模块”中,我们引入了 Craig-Bampton 方法,可以将线性部件简化为计算效率高的降阶模型。通过这种方法,您可以将这些部件用于完全由降阶部件组成的模型中,或者与非降阶弹性有限元模型结合使用,后者可以是非线性的。这一方法被称为部件模态综合法 或动态子结构方法,在计算时间和内存使用率方面带来了显著的改进。

使用 CMS 降阶模型方法模拟的变速箱壳体的 von Mises 应力,以及周围区域的声压级。
零件库
“多体动力学模块”提供了一个内置几何库,用于创建不同类型的齿轮,包括二维和三维两种形式。利用这个强大的几何库,您可以构建齿轮齿、单个齿轮、一对齿轮或整个轮系。所有齿轮几何都经过参数化处理,您可以根据需要改变输入参数,以定制齿轮齿或齿轮毛坯的形状。为了确保几何图形的有效性,我们还提供了一个特征,用于检查输入参数值的一致性。
尽管齿轮特征是一种纯数学描述,但几何部分主要用于可视化目的。您也可以将它们用于详细的有限元模型。此外,“零件库”还包含参化的链轮和滚子链零件,可供您随意使用。
从“零件库”导入的斜齿轮。该库包含内齿轮、外齿轮和齿条的参数化几何零件。
通过多物理场耦合扩展多体动力学分析
在同一软件环境中轻松耦合多个物理场相互作用。
振动声学
执行多体分析以计算声学振动和噪声。1

本例使用变速箱壳体的法向加速度作为声学分析的边界条件,从而提供变速箱外部的声场。
机电设备
模拟受磁力或感应电流影响的刚体动力学。2

在三个不同的时间点,由感应电流引起的铁芯损耗。
热膨胀
分析摩擦热和热膨胀。3

盘式制动器的温度分布。
转子动力学
将轴承仿真与多体仿真相结合。4

齿轮转子的第二种振动模式。
结构力学
使用通用结构力学来增强多体动力学模型,从而对梁、壳和非线性材料等进行建模。5

洗衣机的特征模态之一。本例使用多体动力学特征对机械装置进行建模,并使用壳单元对盖体建模。
电磁和振动
在二维和三维中模拟电磁效应和振动。2

三相感应电机外壳在特定时刻的 Von Mises 应力分布。
流体-多体相互作用
模拟流体和刚性或可变形固体相互影响的现象。

浸没在流体中的机构的闭合运动和流体引起的向前运动。
疲劳
对关键柔体执行疲劳分析。6

往复式发动机柔性部件的应力
备注:
1. 需要“声学模块”
2. 需要“AC/DC 模块”
3. 需要“传热模块”
4. 需要“转子动力学模块”
5. 需要“结构力学模块”
6. 需要“疲劳模块”

 客服1
客服1